![]()
The Implicit Backward Time Centered Space (BTCS) Difference Equation for the Heat Equation#
John S Butler john.s.butler@tudublin.ie Course Notes Github#
Overview#
This notebook will implement the implicit Backward Time Centered Space (FTCS) Difference method for the Heat Equation.
The Heat Equation#
The Heat Equation is the first order in time (\(t\)) and second order in space (\(x\)) Partial Differential Equation:
the equation describes heat transfer on a domain
with an initial condition at time \(t=0\) for all \(x\) and boundary condition on the left (\(x=0\)) and right side (\(x=1\)).
Backward Time Centered Space (BTCS) Difference method#
This notebook will illustrate the Backward Time Centered Space (BTCS) Difference method for the Heat Equation with the initial conditions
and boundary condition
# LIBRARY
# vector manipulation
import numpy as np
# math functions
import math
# THIS IS FOR PLOTTING
%matplotlib inline
import matplotlib.pyplot as plt # side-stepping mpl backend
import warnings
warnings.filterwarnings("ignore")
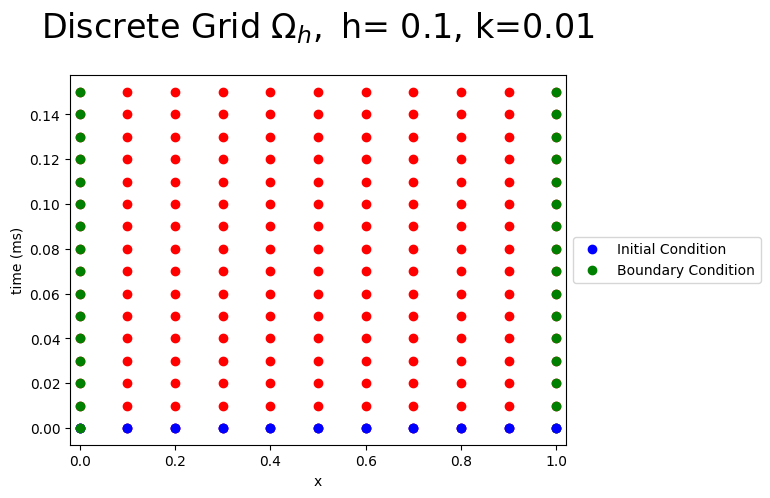
Discete Grid#
The region \(\Omega\) is discretised into a uniform mesh \(\Omega_h\). In the space \(x\) direction into \(N\) steps giving a stepsize of
resulting in
and into \(N_t\) steps in the time \(t\) direction giving a stepsize of
resulting in
The Figure below shows the discrete grid points for \(N=10\) and \(Nt=100\), the known boundary conditions (green), initial conditions (blue) and the unknown values (red) of the Heat Equation.
N=10
Nt=100
h=1/N
k=1/Nt
r=k/(h*h)
time_steps=15
time=np.arange(0,(time_steps+.5)*k,k)
x=np.arange(0,1.0001,h)
X, Y = np.meshgrid(x, time)
fig = plt.figure()
plt.plot(X,Y,'ro');
plt.plot(x,0*x,'bo',label='Initial Condition');
plt.plot(np.ones(time_steps+1),time,'go',label='Boundary Condition');
plt.plot(x,0*x,'bo');
plt.plot(0*time,time,'go');
plt.xlim((-0.02,1.02))
plt.xlabel('x')
plt.ylabel('time (ms)')
plt.legend(loc='center left', bbox_to_anchor=(1, 0.5))
plt.title(r'Discrete Grid $\Omega_h,$ h= %s, k=%s'%(h,k),fontsize=24,y=1.08)
plt.show();
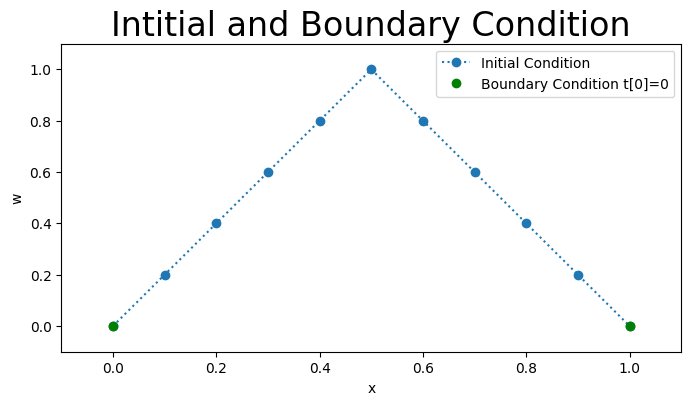
Discrete Initial and Boundary Conditions#
The discrete initial conditions are
and the discete boundary conditions are
where \(w[i,j]\) is the numerical approximation of \(U(x[i],t[j])\).
The Figure below plots values of \(w[i,0]\) for the inital (blue) and boundary (red) conditions for \(t[0]=0.\)
w=np.zeros((N+1,time_steps+1))
b=np.zeros(N-1)
# Initial Condition
for i in range (1,N):
w[i,0]=2*x[i]
if x[i]>0.5:
w[i,0]=2*(1-x[i])
# Boundary Condition
for k in range (0,time_steps):
w[0,k]=0
w[N,k]=0
fig = plt.figure(figsize=(8,4))
plt.plot(x,w[:,0],'o:',label='Initial Condition')
plt.plot(x[[0,N]],w[[0,N],0],'go',label='Boundary Condition t[0]=0')
#plt.plot(x[N],w[N,0],'go')
plt.xlim([-0.1,1.1])
plt.ylim([-0.1,1.1])
plt.title('Intitial and Boundary Condition',fontsize=24)
plt.xlabel('x')
plt.ylabel('w')
plt.legend(loc='best')
plt.show()
The Implicit Backward Time Centered Space (BTCS) Difference Equation#
The implicit Backward Time Centered Space (BTCS) difference equation of the Heat Equation is derived by discretising
around \((x_i,t_{j+1})\) giving the difference equation
Rearranging the equation we get
for \(i=1,...9\) where \(r=\frac{k}{h^2}\).
This gives the formula for the unknown term \(w_{ij+1}\) at the \((ij+1)\) mesh points in terms of \(x[i]\) along the jth time row.
Hence we can calculate the unknown pivotal values of \(w\) along the first row of \(j=1\) in terms of the known boundary conditions.
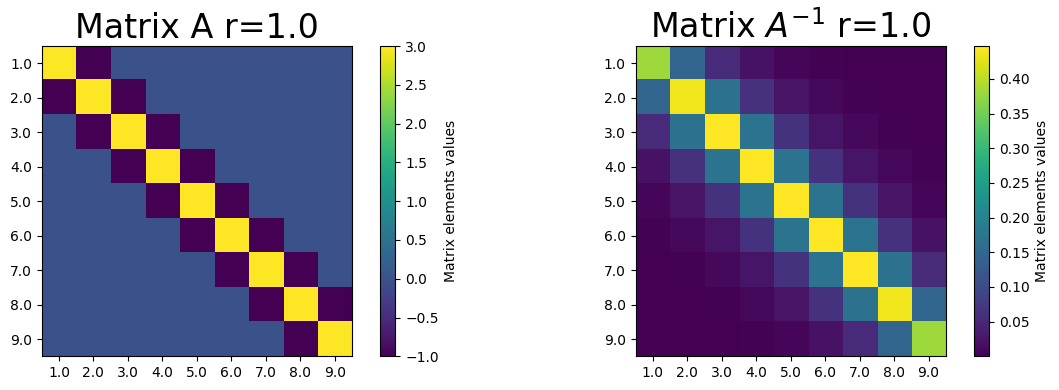
This can be written in matrix form
for which \(A\) is a \(9\times9\) matrix:
It is assumed that the boundary values \(w_{0j+1}\) and \(w_{10j+1}\) are known for \(j=1,2,...\), and \(w_{i0}\) for \(i=0,...,10\) is the initial condition. The Figure below shows the values of the \(9\times 9\) matrix in colour plot form for \(r=\frac{k}{h^2}\).
A=np.zeros((N-1,N-1))
for i in range (0,N-1):
A[i,i]=1+2*r
for i in range (0,N-2):
A[i+1,i]=-r
A[i,i+1]=-r
Ainv=np.linalg.inv(A)
fig = plt.figure(figsize=(12,4));
plt.subplot(121)
plt.imshow(A,interpolation='none');
plt.xticks(np.arange(N-1), np.arange(1,N-0.9,1));
plt.yticks(np.arange(N-1), np.arange(1,N-0.9,1));
clb=plt.colorbar();
clb.set_label('Matrix elements values');
#clb.set_clim((-1,1));
plt.title('Matrix A r=%s'%(np.round(r,3)),fontsize=24)
plt.subplot(122)
plt.imshow(Ainv,interpolation='none');
plt.xticks(np.arange(N-1), np.arange(1,N-0.9,1));
plt.yticks(np.arange(N-1), np.arange(1,N-0.9,1));
clb=plt.colorbar();
clb.set_label('Matrix elements values');
#clb.set_clim((-1,1));
plt.title(r'Matrix $A^{-1}$ r=%s'%(np.round(r,3)),fontsize=24)
fig.tight_layout()
plt.show();
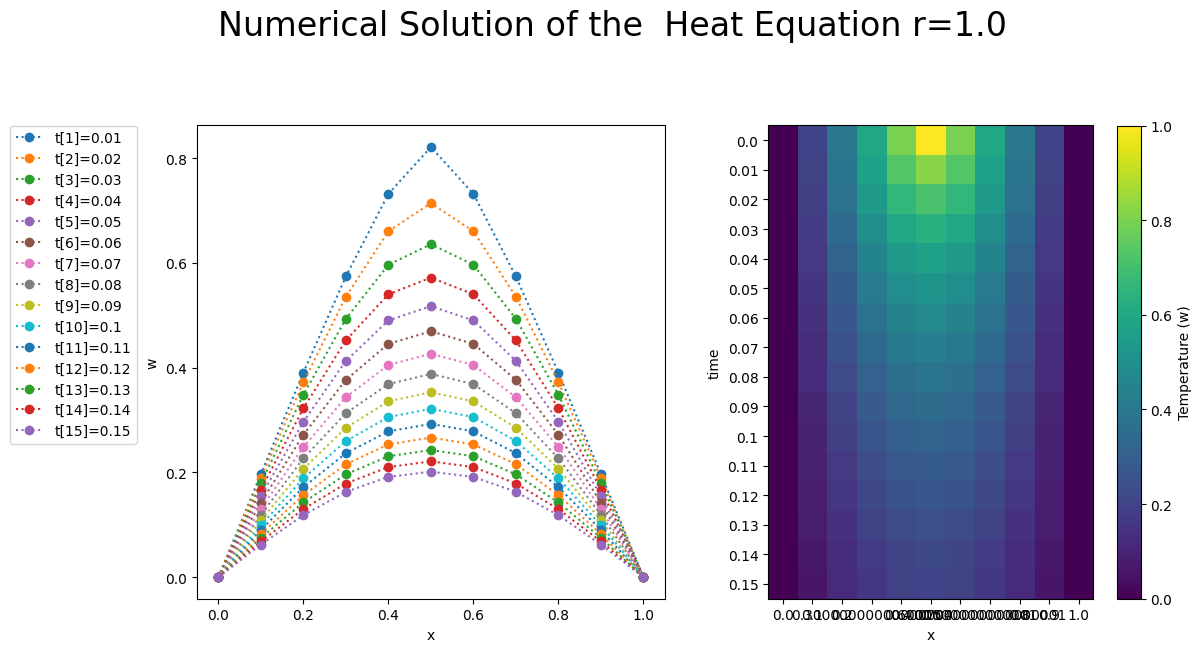
Results#
To numerically approximate the solution at \(t[1]\) the matrix equation becomes
where all the right hand side is known. To approximate solution at time \(t[2]\) we use the matrix equation
Each set of numerical solutions \(w[i,j]\) for all \(i\) at the previous time step is used to approximate the solution \(w[i,j+1]\). The Figure below shows the numerical approximation \(w[i,j]\) of the Heat Equation using the FTCS method at \(x[i]\) for \(i=0,...,10\) and time steps \(t[j]\) for \(j=1,...,15\). The left plot shows the numerical approximation \(w[i,j]\) as a function of \(x[i]\) with each color representing the different time steps \(t[j]\). The right plot shows the numerical approximation \(w[i,j]\) as colour plot as a function of \(x[i]\), on the \(x[i]\) axis and time \(t[j]\) on the \(y\) axis. The solution is stable for \(r>\frac{1}{2}\) unlike in the explicit method.
fig = plt.figure(figsize=(12,6))
plt.subplot(121)
for j in range (1,time_steps+1):
b[0]=r*w[0,j]
b[N-2]=r*w[N,j]
w[1:(N),j]=np.dot(Ainv,w[1:(N),j-1]+b)
plt.plot(x,w[:,j],'o:',label='t[%s]=%s'%(j,time[j]))
plt.xlabel('x')
plt.ylabel('w')
#plt.legend(loc='bottom', bbox_to_anchor=(0.5, -0.1))
plt.legend(bbox_to_anchor=(-.4, 1), loc=2, borderaxespad=0.)
plt.subplot(122)
plt.imshow(w.transpose())
plt.xticks(np.arange(len(x)), x)
plt.yticks(np.arange(len(time)), time)
plt.xlabel('x')
plt.ylabel('time')
clb=plt.colorbar()
clb.set_label('Temperature (w)')
plt.suptitle('Numerical Solution of the Heat Equation r=%s'%(np.round(r,3)),fontsize=24,y=1.08)
fig.tight_layout()
plt.show()
Local Trunction Error#
The local truncation error of the classical implicit difference given by
of the heat equation
is calculated by substituting the exact solution into the difference scheme give the truncation error:
By Taylors expansions we have
substituting these into the expression for \(T_{ij+1}\) gives
As \(U\) is the solution to the differential equation so
the principal part of the local truncation error is
Hence the truncation error is
Stability Analysis#
To investigating the stability of the fully implicit BTCS difference method of the Heat Equation, we will use the von Neumann method. The difference equation is:
approximating
at \((ph,k(q+1))\). Substituting \(w_{pq}=e^{i\beta x}\xi^{q}\) into the difference equation gives:
where \(r=\frac{k}{h_x^2}\). Divide across by \(e^{i\beta (p)h}\xi^{q}\) leads to
Hence
therefore the equation is unconditionally stable as \(0 < \xi \leq 1\) for all \(r\) and all \(\beta\) .
References#
[1] G D Smith Numerical Solution of Partial Differential Equations: Finite Difference Method Oxford 1992
[2] Butler, J. (2019). John S Butler Numerical Methods for Differential Equations. [online] Maths.dit.ie. Available at: http://www.maths.dit.ie/~johnbutler/Teaching_NumericalMethods.html [Accessed 14 Mar. 2019].
[3] Wikipedia contributors. (2019, February 22). Heat equation. In Wikipedia, The Free Encyclopedia. Available at: https://en.wikipedia.org/w/index.php?title=Heat_equation&oldid=884580138 [Accessed 14 Mar. 2019].