![]()
Non-Linear Shooting Method#
John S Butler john.s.butler@tudublin.ie Course Notes Github#
Overview#
This notebook illustates the implentation of a the non-linear shooting method to a non-linear boundary value problem.
The non-linear shooting method is a bit like the game Angry Birds to make a first guess and then you refine. The video below walks through the code.
from IPython.display import HTML
HTML('<iframe width="560" height="315" src="https://www.youtube.com/embed/B7MQe09lDC4" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture" allowfullscreen></iframe>')
/Users/johnbutler/opt/anaconda3/lib/python3.8/site-packages/IPython/core/display.py:724: UserWarning: Consider using IPython.display.IFrame instead
warnings.warn("Consider using IPython.display.IFrame instead")
Introduction#
To numerically approximate the non-linear Boundary Value Problem
with the boundary conditions \begin{equation}y(a)=\alpha,\end{equation} and
using the non-linear shooting method, the Boundary Value Problem is divided into two Initial Value Problems:
The first 2nd order non-linear Initial Value Problem is the same as the original Boundary Value Problem with an extra initial condtion \(y_1^{'}(a)=\lambda_0\).
The second 2nd order Initial Value Problem is with respect to \(z=\frac{\partial y}{\partial \lambda}\) with the initial condtions \(z(a)=0\) and \(z^{'}(a)=1\).
combining these results together to get the unique solution
Unlike the linear method, the non-linear shooting method is iterative to get the value of \(\lambda\) that results in the same solution as the Boundary Value Problem.
The first choice of \(\lambda_0\) is a guess, then after the first iteration a Newton Raphson method is used to update \(\lambda,\)
which can be re-written as,
until \(|\lambda_{k}-\lambda_{k-1}|<tol\).
The introduction of \(\lambda\) is the introduction of a new variable that motivates the second 2nd order Initial Value Problem.
import numpy as np
import math
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings("ignore")
Example Non-linear Boundary Value Problem#
To illustrate the shooting method we shall apply it to the non-linear Boundary Value Problem:
with boundary conditions
The boundary value problem is broken into two second order Initial Value Problems:
The first 2nd order Initial Value Problem is the same as the original Boundary Value Problem with an extra initial condtion \(y^{'}(0)=\lambda_0\).
which can be written a two first order initial value problems
The second 2nd order Initial Value Problem \(z=\frac{\partial y}{\partial \lambda}\) with the initial condtions \(z(a)=0\) and \(z^{'}(a)=1\).with the initial condtions \(z^{'}(0)=0\) and \(z^{'}(0)=1\).
which can be written a two first order initial value problems
The first choice of \(\lambda\) we guess \(\lambda_0=0.2\). Then after the first iteration a Newton Raphson method is used to update \(\lambda\)
until \(\lambda_{k}-\lambda_{k-1}<0.001\).
Discrete Axis#
The stepsize is defined as
here it is
giving
for \(i=0,1,...10.\) The plot shows the discrete time intervals.
## BVP
N=10
h=1/N
x=np.linspace(0,1,N+1)
fig = plt.figure(figsize=(10,4))
plt.plot(x,0*x,'o:',color='red')
plt.xlim((0,1))
plt.xlabel('x',fontsize=16)
plt.title('Illustration of discrete time points for h=%s'%(h),fontsize=32)
plt.show()
Initial conditions#
The initial conditions for the discrete equations are:
Let \(\lambda_0=0.2\)
U1=np.zeros(N+1)
U2=np.zeros(N+1)
Z1=np.zeros(N+1)
Z2=np.zeros(N+1)
lambda_app=[0.2]
U1[0]=-2.5
U2[0]=lambda_app[0]
Z1[0]=0
Z2[0]=1
beta=3
Numerical method#
The Euler method is applied to numerically approximate the solution of the system of the two second order non-linear initial value problems they are converted in to two pairs of two first order non-linear initial value problems:
Discrete form of Equation 1
with the initial conditions \(u_{1}[0]=-2.5\) and \(u_{2}[0]=\lambda_0.\)
Discrete form of Equation 2
with the initial conditions \(z_{1}[0]=0\) and \(z_{2}[0]=1\).
At the end of each iteration
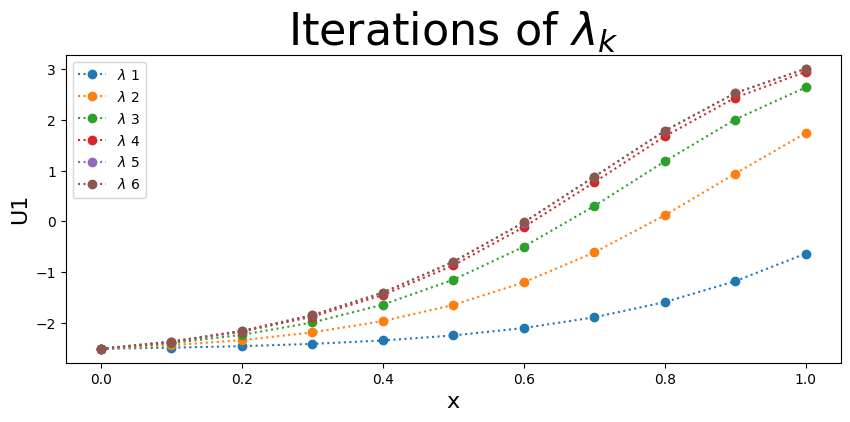
The initial choice of \(\lambda_0=0.2\) is up to the user then for each iteration of the system \(\lambda\) is updated using the formula:
The plot below shows the numerical approximation of the solution to the non-linear Boundary Value Problem for each iteration.
The stopping criteria for the iterative process is
with \(tol=0.0001.\)
tol=0.0001
k=0
fig = plt.figure(figsize=(10,4))
while k<20:
k=k+1
for i in range (0,N):
U1[i+1]=U1[i]+h*(U2[i])
U2[i+1]=U2[i]+h*(-2*U2[i]*U1[i])
Z1[i+1]=Z1[i]+h*(Z2[i])
Z2[i+1]=Z2[i]+h*(-2*U2[i]*Z1[i]-2*Z2[i]*U1[i])
lambda_app.append(lambda_app[k-1]-(U1[N]-beta)/Z1[N])
plt.plot(x,U1,':o',label=r"$\lambda$ %s"%(k))
plt.xlabel('x',fontsize=16)
plt.ylabel('U1',fontsize=16)
U2[0]=lambda_app[k]
if abs(lambda_app[k]-lambda_app[k-1])<tol:
break
plt.legend(loc='best')
plt.title(r"Iterations of $\lambda_k$",fontsize=32)
plt.show()
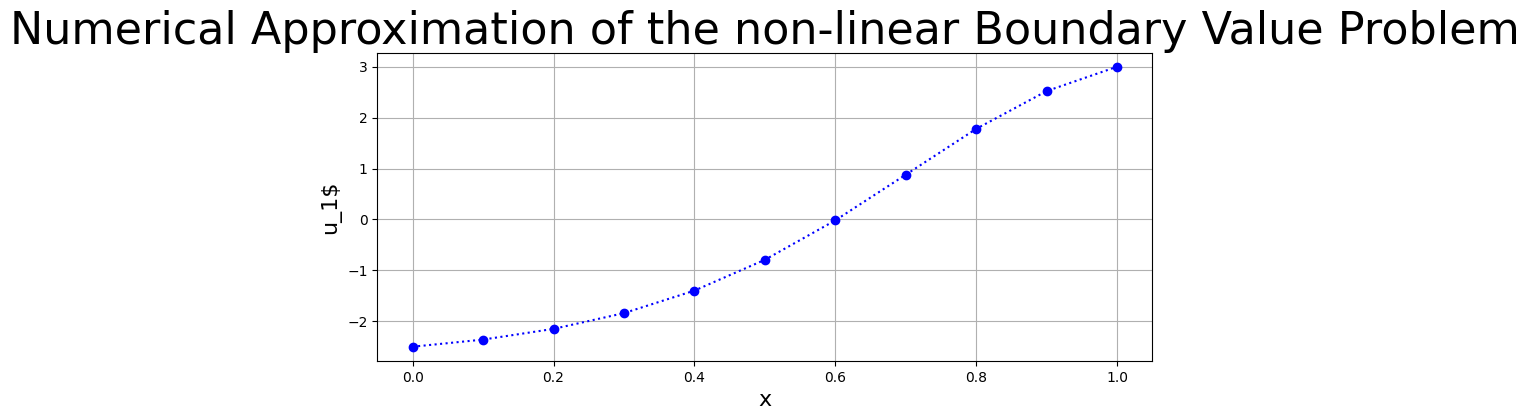
Results#
The plot below shows the final iteration of the numerical approximation for the non-linear boundary value problem.
fig = plt.figure(figsize=(10,4))
plt.grid(True)
plt.plot(x,U1,'b:o')
plt.title("Numerical Approximation of the non-linear Boundary Value Problem",fontsize=32)
plt.xlabel('x',fontsize=16)
plt.ylabel("u_1$",fontsize=16)
plt.show()
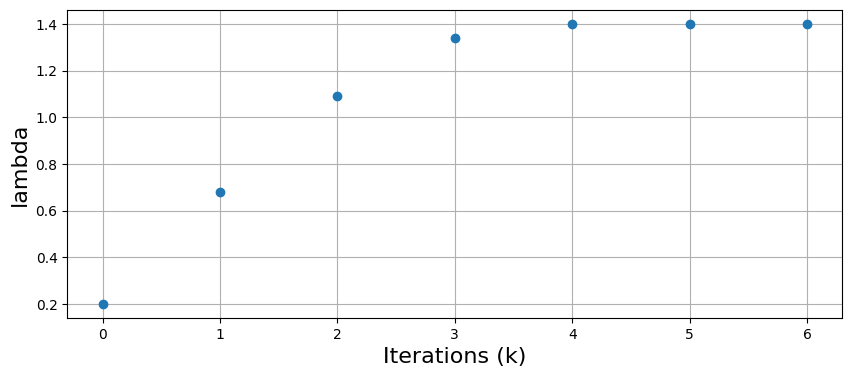
\(\lambda\) Iteration#
The plot below shows the iterations of \(\lambda_k\), after \(4\) iterations the value of \(\lambda\) stabilies.
fig = plt.figure(figsize=(10,4))
plt.grid(True)
plt.plot(lambda_app,'o')
#plt.title("Values of $\lambda$ for each interation ",fontsize=32)
plt.xlabel('Iterations (k)',fontsize=16)
plt.ylabel("lambda",fontsize=16)
plt.show()