Finite Difference Methods for the Poisson Equation¶
This notebook will focus on numerically approximating a inhomogenous second order Poisson Equation.
The Differential Equation¶
The general two dimensional Poisson Equation is of the form: $\( \frac{\partial^2 u}{\partial y^2} + \frac{\partial^2 u}{\partial x^2}=f(x,y), \ \ \ (x,y) \in \Omega=(0,1)\times (0,1),\)\( with boundary conditions \)\(U(x,y) = g(x,y), \ \ \ (x,y)\in\delta\Omega\text{ - boundary}. \)$
Homogenous Poisson Equation¶
This notebook will implement a finite difference scheme to approximate the inhomogenous form of the Poisson Equation \(f(x,y)=100(x^2+y^2)\): $\( \frac{\partial^2 u}{\partial y^2} + \frac{\partial^2 u}{\partial x^2}=100(x^2+y^2).\)\( with the Boundary Conditions: \)\( u(x,0)=\sin(2\pi x), \ \ \ \ \ 0 \leq x \leq 1, \text{ lower},\)\( \)\( u(x,1)=\sin(2\pi x), \ \ \ \ \ 0 \leq x \leq 1, \text{ upper},\)\( \)\( u(0,y)=2\sin(2\pi y), \ \ \ \ \ 0 \leq y \leq 1, \text{ left},\)\( \)\( u(1,y)=2\sin(2\pi y), \ \ \ \ \ 0 \leq y \leq 1, \text{ right}.\)$
# LIBRARY
# vector manipulation
import numpy as np
# math functions
import math
# THIS IS FOR PLOTTING
%matplotlib inline
import matplotlib.pyplot as plt # side-stepping mpl backend
import warnings
warnings.filterwarnings("ignore")
from IPython.display import HTML
from mpl_toolkits.mplot3d import axes3d
import matplotlib.pyplot as plt
Discete Grid¶
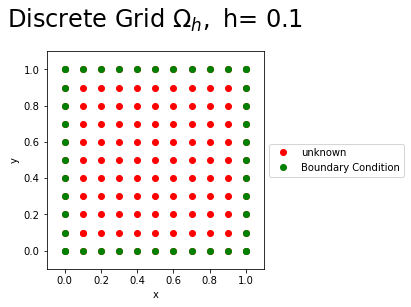
The region \(\Omega=(0,1)\times(0,1)\) is discretised into a uniform mesh \(\Omega_h\). In the \(x\) and \(y\) directions into \(N\) steps giving a stepsize of $\( h=\frac{1-0}{N},\)\( resulting in \)\(x[i]=0+ih, \ \ \ i=0,1,...,N,\)\( and \)\(x[j]=0+jh, \ \ \ j=0,1,...,N,\)\( The Figure below shows the discrete grid points for \)N=10$, the known boundary conditions (green), and the unknown values (red) of the Poisson Equation.
N=10
h=1/N
x=np.arange(0,1.0001,h)
y=np.arange(0,1.0001,h)
X, Y = np.meshgrid(x, y)
fig = plt.figure()
plt.plot(x[1],y[1],'ro',label='unknown');
plt.plot(X,Y,'ro');
plt.plot(np.ones(N+1),y,'go',label='Boundary Condition');
plt.plot(np.zeros(N+1),y,'go');
plt.plot(x,np.zeros(N+1),'go');
plt.plot(x, np.ones(N+1),'go');
plt.xlim((-0.1,1.1))
plt.ylim((-0.1,1.1))
plt.xlabel('x')
plt.ylabel('y')
plt.gca().set_aspect('equal', adjustable='box')
plt.legend(loc='center left', bbox_to_anchor=(1, 0.5))
plt.title(r'Discrete Grid $\Omega_h,$ h= %s'%(h),fontsize=24,y=1.08)
plt.show();
Boundary Conditions¶
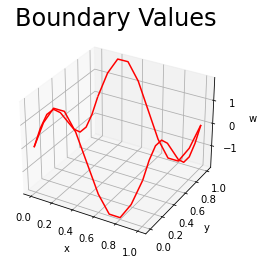
The discrete boundary conditions are $\( w_{i0}=w[i,0]=\sin(2\pi x[i]), \text{ for } i=0,...,10, \text{ upper},\)$
The Figure below plots the boundary values of \(w[i,j]\).
w=np.zeros((N+1,N+1))
for i in range (0,N):
w[i,0]=np.sin(2*np.pi*x[i]) #left Boundary
w[i,N]=np.sin(2*np.pi*x[i]) #Right Boundary
for j in range (0,N):
w[0,j]=2*np.sin(2*np.pi*y[j]) #Lower Boundary
w[N,j]=2*np.sin(2*np.pi*y[j]) #Upper Boundary
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
# Plot a basic wireframe.
ax.plot_wireframe(X, Y, w,color='r', rstride=10, cstride=10)
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_zlabel('w')
plt.title(r'Boundary Values',fontsize=24,y=1.08)
plt.show()
Numerical Method¶
The Poisson Equation is discretised using \(\delta_x^2\) is the central difference approximation of the second derivative in the \(x\) direction $\(\delta_x^2=\frac{1}{h^2}(w_{i+1j}-2w_{ij}+w_{i-1j}), \)\( and \)\delta_y^2\( is the central difference approximation of the second derivative in the \)y\( direction \)\(\delta_y^2=\frac{1}{h^2}(w_{ij+1}-2w_{ij}+w_{ij-1}). \)\( The gives the Poisson Difference Equation, \)\(-(\delta_x^2w_{ij}+\delta_y^2w_{ij})=f_{ij} \ \ (x_i,y_j) \in \Omega_h, \)\( \)\(w_{ij}=g_{ij} \ \ (x_i,y_j) \in \partial\Omega_h, \)\( where \)w_ij\( is the numerical approximation of \)U\( at \)x_i\( and \)y_j\(. Expanding the the Poisson Difference Equation gives the five point method, \)\(-(w_{i-1j}+w_{ij-1}-4w_{ij}+w_{ij+1}+w_{i+1j})=h^2f_{ij} \)\( for \)i=1,…,N-1\( and \)j=1,…,N-1.$
Matrix form¶
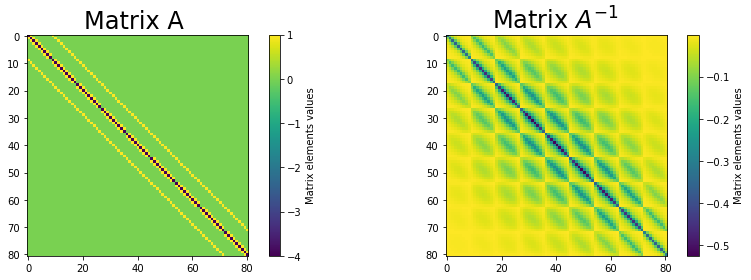
This can be written as a system of \((N-1)\times(N-1)\) equations can be arranged in matrix form $\( A\mathbf{w}=\mathbf{r},\)\( where \)A\( is an \)(N-1)^2\times(N-1)^2\( matrix made up of the following block tridiagonal structure \)\(\left(\begin{array}{ccccccc} T&I&0&0&.&.&.\\ I&T&I&0&0&.&.\\ .&.&.&.&.&.&.\\ .&.&.&0&I&T&I\\ .&.&.&.&0&I&T\\ \end{array}\right), \)\( where \)I\( denotes an \)N-1 \times N-1\( identity matrix and \)T\( is the tridiagonal matrix of the form: \)\( T=\left(\begin{array}{ccccccc} -4&1&0&0&.&.&.\\ 1&-4&1&0&0&.&.\\ .&.&.&.&.&.&.\\ .&.&.&0&1&-4&1\\ .&.&.&.&0&1&-4\\ \end{array}\right). \)\( The plot below shows the matrix \)A\( and its inverse \)A^{-1}$ as a colourplot.
N2=(N-1)*(N-1)
A=np.zeros((N2,N2))
## Diagonal
for i in range (0,N-1):
for j in range (0,N-1):
A[i+(N-1)*j,i+(N-1)*j]=-4
# LOWER DIAGONAL
for i in range (1,N-1):
for j in range (0,N-1):
A[i+(N-1)*j,i+(N-1)*j-1]=1
# UPPPER DIAGONAL
for i in range (0,N-2):
for j in range (0,N-1):
A[i+(N-1)*j,i+(N-1)*j+1]=1
# LOWER IDENTITY MATRIX
for i in range (0,N-1):
for j in range (1,N-1):
A[i+(N-1)*j,i+(N-1)*(j-1)]=1
# UPPER IDENTITY MATRIX
for i in range (0,N-1):
for j in range (0,N-2):
A[i+(N-1)*j,i+(N-1)*(j+1)]=1
Ainv=np.linalg.inv(A)
fig = plt.figure(figsize=(12,4));
plt.subplot(121)
plt.imshow(A,interpolation='none');
clb=plt.colorbar();
clb.set_label('Matrix elements values');
plt.title('Matrix A ',fontsize=24)
plt.subplot(122)
plt.imshow(Ainv,interpolation='none');
clb=plt.colorbar();
clb.set_label('Matrix elements values');
plt.title(r'Matrix $A^{-1}$ ',fontsize=24)
fig.tight_layout()
plt.show();
The vector \(\mathbf{w}\) is of length \((N-1)\times(N-1)\) which made up of \(N-1\) subvectors \(\mathbf{w}_j\) of length \(N-1\) of the form $\(\mathbf{w}_j=\left(\begin{array}{c} w_{1j}\\ w_{2j}\\ .\\ .\\ w_{N-2j}\\ w_{N-1j}\\ \end{array}\right). \)\( The vector \)\mathbf{r}\( is of length \)(N-1)\times(N-1)\( which made up of \)N-1\( subvectors of the form \)\mathbf{r}_j=-h^2\mathbf{f}j-\mathbf{bx}{j}-\mathbf{by}_j\(, where \)\mathbf{bx}_j \( is the vector of left and right boundary conditions \)\(\mathbf{bx}_j =\left(\begin{array}{c} w_{0j}\\ 0\\ .\\ .\\ 0\\ w_{Nj} \end{array}\right), \)$
for \(j=1,..,N-1\), where \(\mathbf{by}_j\) is the vector of the lower boundary condition for \(j=1\),
upper boundary condition for \(j=N-1\)
for \(j=2,...,N-2\) $\(\mathbf{by}_j=0,\)\( and \)\(\mathbf{f}_j =100\left(\begin{array}{c} x_1^2+y_j^2\\ x_2^2+y_j^2\\ .\\ .\\ x_{N-2}^2+y_j^2\\ x_{N-1}^2+y_j^2 \end{array}\right) \)\( for \)j=1,…,N-1$.
r=np.zeros(N2)
# vector r
for i in range (0,N-1):
for j in range (0,N-1):
r[i+(N-1)*j]=100*h*h*(x[i+1]*x[i+1]+y[j+1]*y[j+1])
# Boundary
b_bottom_top=np.zeros(N2)
for i in range (0,N-1):
b_bottom_top[i]=np.sin(2*np.pi*x[i+1]) #Bottom Boundary
b_bottom_top[i+(N-1)*(N-2)]=np.sin(2*np.pi*x[i+1])# Top Boundary
b_left_right=np.zeros(N2)
for j in range (0,N-1):
b_left_right[(N-1)*j]=2*np.sin(2*np.pi*y[j+1]) # Left Boundary
b_left_right[N-2+(N-1)*j]=2*np.sin(2*np.pi*y[j+1])# Right Boundary
b=b_left_right+b_bottom_top
Results¶
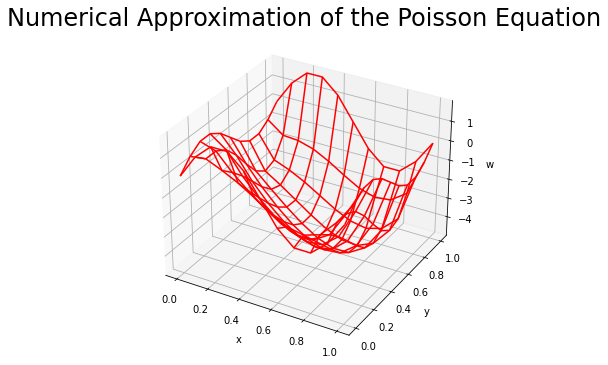
To solve the system for \(\mathbf{w}\) invert the matrix \(A\) $\( A\mathbf{w}=\mathbf{r},\)\( such that \)\( \mathbf{w}=A^{-1}\mathbf{r}.\)\( Lastly, as \)\mathbf{w}$ is in vector it has to be reshaped into grid form to plot.
The figure below shows the numerical approximation of the homogeneous Equation.
C=np.dot(Ainv,r-b)
w[1:N,1:N]=C.reshape((N-1,N-1))
fig = plt.figure(figsize=(8,6))
ax = fig.add_subplot(111, projection='3d');
# Plot a basic wireframe.
ax.plot_wireframe(X, Y, w,color='r');
ax.set_xlabel('x');
ax.set_ylabel('y');
ax.set_zlabel('w');
plt.title(r'Numerical Approximation of the Poisson Equation',fontsize=24,y=1.08);
plt.show();
Consistency and Convergence¶
We now ask how well the grid function determined by the five point scheme approximates the exact solution of the Poisson problem.
Consistency¶
Consitency (Definition)¶
Let $\(\nabla^2_h(\varphi)=-(\varphi_{i-1j}+\varphi_{ij-1}-4\varphi_{ij}+\varphi_{ij+1}+\varphi_{i+1j})\)\( denote the finite difference approximation associated with the grid \)\Omega_h\( having the mesh size \)h\(, to a partial differential operator \)\(\nabla^2(\varphi)=\frac{\partial^2 \varphi}{\partial x^2}+\frac{\partial^2 \varphi}{\partial y^2}\)\( defined on a simply connected, open set \)\Omega \subset R^2\(. For a given function \)\varphi\in C^{\infty}(\Omega)\(, the truncation error of \)\nabla^2_h\( is \)\(\tau_{h}(\mathbf{x})=(\nabla^2-\nabla^2_h)\varphi(\mathbf{x}) \)\( The approximation \)\nabla^2_h\( is consistent with \)\nabla^2\( if \)\( \lim_{h\rightarrow 0}\tau_h(\mathbf{x})=0,\)\( for all \)\mathbf{x} \in D\( and all \)\varphi \in C^{\infty}(\Omega)\(. The approximation is consistent to order \)p\( if \)\tau_h(\mathbf{x})=O(h^p)$.
In other words a method is consistent with the differential equation it is approximating.
Proof of Consistency¶
The five-point difference analog \(\nabla^2_h\) is consistent to order 2 with \(\nabla^2\).
Proof
Pick \(\varphi \in C^{\infty}(D)\), and let \((x,y) \in \Omega\) be a point such that \((x\pm h, y),(x,y \pm h) \in \Omega\bigcup \partial\Omega\). By the Taylor Theorem
where \(\zeta^{\pm} \in (x-h,x+h)\). Adding this pair of equation together and rearranging , we get $\(\frac{1}{h^2}[\varphi(x+h,y)-2\varphi(x,y)+\varphi(x-h,y) ] -\frac{\partial^2 \varphi}{\partial x^2}(x,y)=\frac{h^2}{4!}\left[\frac{\partial^4 \varphi}{\partial x^4}(\zeta^{+},y)+ \frac{\partial^4 \varphi}{\partial x^4}(\zeta^{-},y) \right] \)\( By the intermediate value theorem \)\(\left[\frac{\partial^4 \varphi}{\partial x^4}(\zeta^{+},y)+ \frac{\partial^4 \varphi}{\partial x^4}(\zeta^{-},y) \right] =2\frac{\partial^4 \varphi}{\partial x^4}(\zeta,y),\)\( for some \)\zeta \in (x-h,x+h)\(. Therefore, \)\(\delta_x^2(x,y) =\frac{\partial^2 \varphi}{\partial x^2}(x,y)+\frac{h^2}{2!}\frac{\partial^4 \varphi}{\partial x^4}(\zeta,y)\)\( Similar reasoning shows that \)\(\delta_y^2(x,y) =\frac{\partial^2 \varphi}{\partial y^2}(x,y)+\frac{h^2}{2!}\frac{\partial^4 \varphi}{\partial y^4}(x,\eta) \)\( for some \)\eta \in (y-h,y+h)\(. We conclude that \)\tau_h(x,y)=(\nabla-\nabla_h)\varphi(x,y)=O(h^2).$
Convergence¶
Definition¶
Let \(\nabla^2_hw(\mathbf{x}_j)=f(\mathbf{x}_j)\) be a finite difference approximation, defined on a grid mesh size \(h\), to a PDE \(\nabla^2U(\mathbf{x})=f(\mathbf{x})\) on a simply connected set \(D \subset R^n\). Assume that \(w(x,y)=U(x,y)\) at all points \((x,y)\) on the boundary \(\partial\Omega\). The finite difference scheme converges (or is convergent) if $\( \max_j|U(\mathbf{x}_j)-w(\mathbf{x}_j)| \rightarrow 0 \mbox{ as } h \rightarrow 0.\)$
Theorem (DISCRETE MAXIMUM PRINCIPLE).¶
If \(\nabla^2_hV_{ij}\geq 0\) for all points \((x_i,y_j) \in \Omega_h\), then $\( \max_{(x_i,y_j)\in\Omega_h}V_{ij}\leq \max_{(x_i,y_j)\in\partial\Omega_h}V_{ij},\)\( If \)\nabla^2_hV_{ij}\leq 0\( for all points \)(x_i,y_j) \in \Omega_h\(, then \)\( \min_{(x_i,y_j)\in\Omega_h}V_{ij}\geq \min_{(x_i,y_j)\in\partial\Omega_h}V_{ij}.\)$
Propositions¶
The zero grid function for which \(U_{ij}=0\) for all \((x_i,y_j) \in \Omega_h \bigcup \partial\Omega_h\) is the only solution to the finite difference problem $\(\nabla_h^2U_{ij}=0 \mbox{ for }(x_i,y_j)\in\Omega_h,\)\( \)\(U_{ij}=0 \mbox{ for }(x_i,y_j)\in\partial\Omega_h.\)$
For prescribed grid functions \(f_{ij}\) and \(g_{ij}\), there exists a unique solution to the problem $\(\nabla_h^2U_{ij}=f_{ij} \mbox{ for }(x_i,y_j)\in\Omega_h,\)\( \)\(U_{ij}=g_{ij} \mbox{ for }(x_i,y_j)\in\partial\Omega_h.\)$
Definition¶
For any grid function \(V:\Omega_h\bigcup\partial\Omega_h \rightarrow R\), $\(||V||_{\Omega} =\max_{(x_i,y_j)\in\Omega_h}|V_{ij}|, \)\( \)\(||V||_{\partial\Omega} =\max_{(x_i,y_j)\in\partial\Omega_h}|V_{ij}|. \)$
Lemma¶
If the grid function \(V:\Omega_h\bigcup\partial\Omega_h\rightarrow R\) satisfies the boundary condition \(V_{ij}=0\) for \((x_i,y_j)\in \partial\Omega_h\), then $\(||V_||_{\Omega}\leq \frac{1}{8}||\nabla_h^2V||_{\Omega}. \)$
Given these Lemmas and Propositions, we can now prove that the solution to the five point scheme \(\nabla^2_h\) is convergent to the exact solution of the Poisson Equation \(\nabla^2\).
Convergence Theorem¶
Let \(U\) be a solution to the Poisson equation and let \(w\) be the grid function that satisfies the discrete analog $\(-\nabla_h^2w_{ij}=f_{ij} \ \ \mbox{ for } (x_i,y_j)\in\Omega_h, \)\( \)\(w_{ij}=g_{ij} \ \ \mbox{ for } (x_i,y_j)\in\partial\Omega_h. \)\( Then there exists a positive constant \)K\( such that \)\(||U-w||_{\Omega}\leq KMh^2, \)\( where \)\( M=\left\{ \left|\left|\frac{\partial^4 U}{\partial x^4} \right|\right|_{\infty}, \left|\left|\frac{\partial^4 U}{\partial y^4} \right|\right|_{\infty} \right\}\)$
Proof
The statement of the theorem assumes that \(U\in C^4(\bar{\Omega})\). This assumption holds if \(f\) and \(g\) are smooth enough. \begin{proof} Following from the proof of the Proposition we have $\( (\nabla_h^2-\nabla^2)U_{ij}=\frac{h^2}{12}\left[ \frac{\partial^4 U}{\partial x^4}(\zeta_i,y_j)+\frac{\partial^4 U}{\partial y^4}(x_i,\eta_j) \right],\)\( for some \)\zeta \in (x_{i-1},x_{i+1})\( and \)\eta_j\in(y_{j-1},y_{j+1})\(. Therefore, \)\( -\nabla_h^2U_{ij}=f_{ij}-\frac{h^2}{12}\left[ \frac{\partial^4 U}{\partial x^4}(\zeta_i,y_j)+\frac{\partial^4 U}{\partial y^4}(x_i,\eta_j) \right].\)\( If we subtract from this the identity equation \)-\nabla_h^2w_{ij}=f_{ij}\( and note that \)U-w\( vanishes on \)\partial\Omega_h\(, we find that \)\( \nabla_h^2(U_{ij}-w_{ij})=\frac{h^2}{12}\left[ \frac{\partial^4 U}{\partial x^4}(\zeta_i,y_j)+\frac{\partial^4 U}{\partial y^4}(x_i,\eta_j) \right].\)$ It follows that